제어기(Control)
human 모델을 움직이거나 웨어러블 로봇을 움직이기 위해서는 제어기가 필요하다.
웨어러블 로봇 평가 시스템에서는 제어기로 ros2_control 패키지를 사용.
입력 신호를 받아서 원하는 움직임(위치, 속도, 힘)이 되도록 출력 신호를 보낸다.
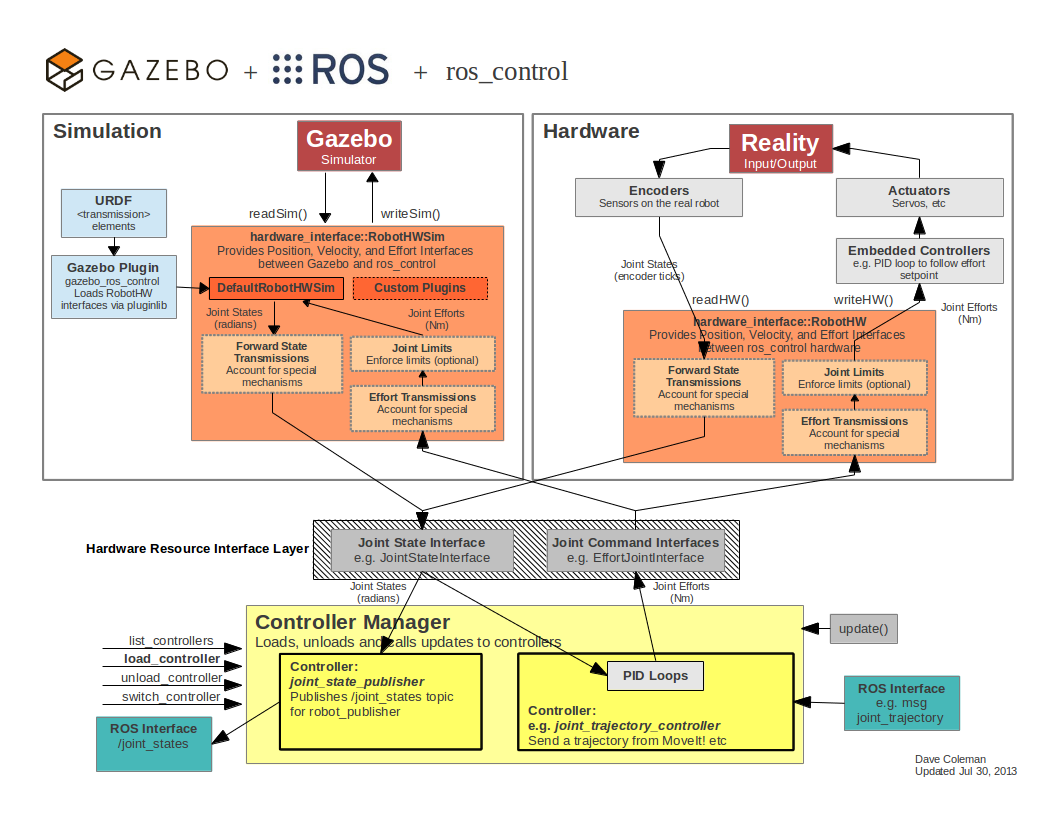
제어 루프

참고
Last updated
human 모델을 움직이거나 웨어러블 로봇을 움직이기 위해서는 제어기가 필요하다.
웨어러블 로봇 평가 시스템에서는 제어기로 ros2_control 패키지를 사용.
입력 신호를 받아서 원하는 움직임(위치, 속도, 힘)이 되도록 출력 신호를 보낸다.
제어 루프
Last updated